目前集定位、监控、报警功能于一体的个人定位系统多采用基于GPS/GSM(GPRS)技术。虽然全球定位系统GPS(Global PosiTIoning Sys-tem)可以提供高精度、覆盖全球的定位,但必须保证GPS接收机和卫星之间有直射路径,这就使得GPS定位系统在建筑物密集的城区和建筑物内部存在盲区。GPSOne综合了GPS、CDMAlX(码分多址分组数据交换网络)、GIS(地理信息系统)和互联网技术,是美国高通公司为基于位置业务而开发的定位技术,采用Client/Server方式。它将无线辅助A-GPS和高级前向链路AFLT三角定位技术有机结合,实现高精度、高可用性和较高速度的定位。在A-GPS定位技术无法使用的环境中,会自动切换到AFLT三角定位技术,确保定位的成功率和精确度。这里基于GPSOne模块DTGS-800和低功耗单片机MSP430设计并实现了具有定位、监控和报警功能的个人定位终端。
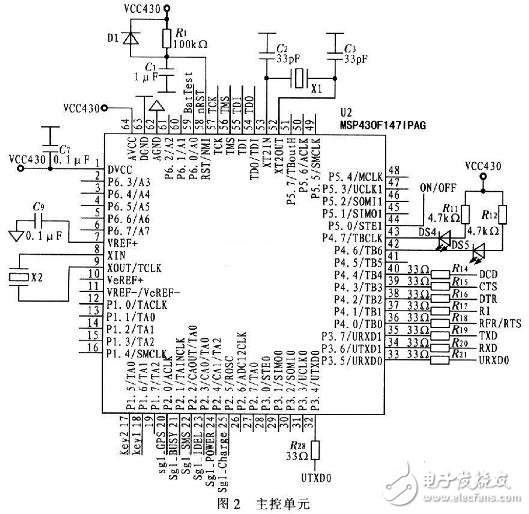
为了解决GPS在室内和高层建筑密集区难以定位的问题,选用DTGS-800 GPSOne模块;为了缩小体积、降低功耗和成本,主控单元MCU选用超低功耗的16位单片机MSP430F147,显示器选用LED。单片机负责控制 GPSOne模块发起定位请求,接收并解析CDMA网络控制中心发送的信息,获取当前的经、纬度及其他信息,并以短信的方式送至控制中心或操作者的手机。主控单元MCU如图2所示。它包括MSP430F147,外接高速晶振和低速晶振,在不需要高速处理时,可将高速晶振关闭,只使用低速晶振,以降低功耗;MSP430F147有2个串行异步通信接口(USART),其中一个(DCD、CTS、DTR、RI、RFR/RTS、TXD、RXD引脚)接口连接DTGS-800的UAR-T1,另一个(URXD0、UTXDO)接口与PC机的串口相连,供系统调试使用。nRst、MS、TCK、TDI、TD0 引脚连接JTAG插座,用于程序下载和在线调试;keyl和key2引脚分别接“Help”和预留按键。外接的LED DS3和LED DS4分别用指示电池电量不足和DTGS-800与MSP430之间的通信;BatTest用于检测电池电量。
DTGS-800模块是定位终端的主体,其内部集成有GPSOne器件,采用GPSOne解决方案定位;支持机卡分离RUIM,提供标准RS-232数据接口和标准的AT命令接口,为数据、语音、短消息和传真提供快速、可靠、安全的传输。该模块可采用外接电源或电池供电,电池供电电压为+4.0 V±10%,外接电源供电电压+4.5 V±10%,外接电源还能通过模块内部的电源管理器件为电池充电。
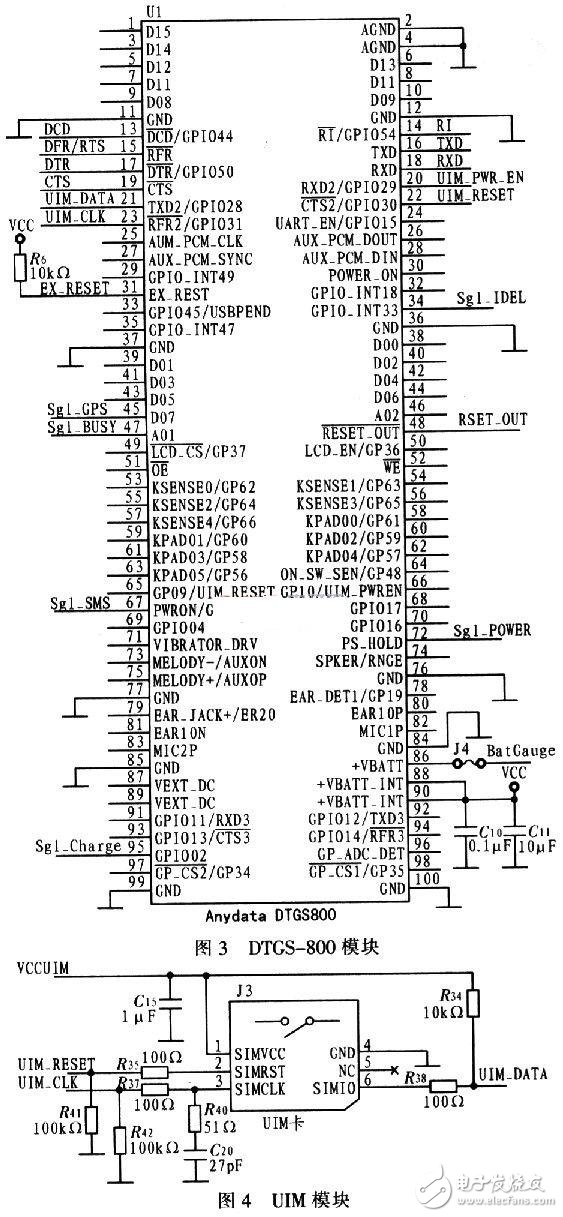
DTGS-800模块的电路如图3所示。其中DCD、CTS、DTR、RI、RFR/RTS、TXD、RXD引脚连接MSP430F147的UART1,是DTGS-800与MSP430F147的通信通道;UIM_DATA、UIM_CLK、UIM_PWR_EN、UIM_RESET接UIM卡;Sgl_SMS、Sgl_IDEL、Sgl_GPS、Sgl_busy、Sgl_Power、Sgl_ch-arge是系统状态指示信号,分别连接 6个LED,用于指示新短信信号、CDMA网络信号、GPS信号、CDMA网络忙、系统上电和电池充电等状态;BatGauge接电池测试端,用于检测电池温度。UIM卡是CDMA手机的一种智能卡,其功能类似于GSM手机中的SIM卡。它支持专用的鉴权加密算法和0TA技术(0ver The Air),可以通过无线空中接口方式对卡上的数据进行更新和管理。UIM卡固定在卡座上,通过卡座的6个引脚与外部连接,如图4所示,其中 UIM_RESET和UIM_CLK需通过100 kΩ电阻下拉,UIM_DATA需通过10 kΩ电阻上拉。
鱼类的游动具有高效性、机动性以及低噪性等优点。因此,仿生机器鱼的研究己成为机器人研究领域的热点。随着仿生机器鱼研究的不断深入,仿生机器鱼在水下搜救、水质检测以及海洋资源勘探等领域发挥着重要的作用。近年来,机器鱼也成为国内国际高校机器人比赛项目之一。本文就是针对在国际水中机器人大赛的大平台上的三关节机器鱼而设计的一套双关节机器鱼控制系统。本机器鱼控制系统具有体积小、成本低、微功耗等优点,可以方便地运用到类似的机器鱼产品中。
机器鱼控制系统总体结构如图1所示。系统主要分为指令发送端和指令执行端,两部分均以CC1110无线单片机作为核心控制器,负责指令的发送、接收、数据处理,进而控制机器鱼的相关执行机构工作。指令发送端的指令来自上位机,USB串口转换电路将USB接口模拟成串口,实现上位机与CC1110的串口通信。电源模块完成电压的变换,为相关电路提供各种合适的工作电压。存储器模块存储机器鱼的相关信息。舵机驱动模块为执行机构舵机提供合适的控制信号。
USB串口转换电路
CH341T是一款USB总线转接芯片,通过简单的接线即可实现USB接口和串口之间的转换,此时无需改动上位机与下位机的程序,通过USB接口即可实现上位机与下位机的串行通信。USB串口转换电路原理图如图2所示。
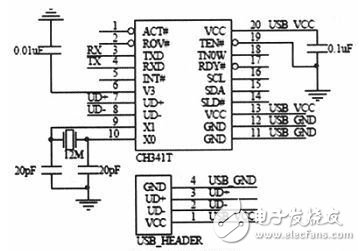
图2 USB串口转换电路
在本设计电路中,将CH341T芯片的SDA和SCL引脚悬空,此时芯片功能为USB转异步串口,模拟计算机串口;CH341T芯片的TXD和RXD两个引脚分别连接到CC1110无线单片机的RX(P0.2)和TX(P0.3)两个引脚;TEN#引脚为串口发送使能端,接地使CH341T能发送数据。 CH341T芯片的地要和CC1110无线单片机的地相连。CH341T不需外接电源,直接由上位机通过USB口提供+5V电源。
DC—DC电压变换电路
指令发送端由USB提供5V电压,指令执行端由电池提供5V直流电压。电池提供的5V直流电压可以直接为舵机驱动芯片以及舵机供电。而系统内部CC1110 无线单片机正常工作电压范围是2.0~3.6V,存储器芯片24AA01正常工作电压范围是1.7~5.5V,这里可以将二者的工作电压选择为3.3V。为此,专门设计了一个DC—DC电压变换电路,将5V直流电压变换为3.3V直流电压后再提供给CC1110无线单片机和24AA01芯片,以保证系统的正常工作。这里采用AMS公司生产的AMS1117芯片设计了电压变换电路,具体的DC-DC电压变换电路如图3所示。
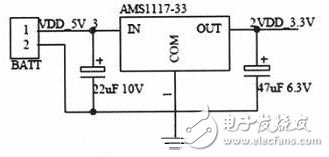
图3 DC-DC电压变换电路
在电压输入端接有22 μF电解电容及电压输出端接有47 μF电解电容,以保证输出电压的稳定。
CC1110无线收发电路
在机器鱼控制系统中,机器鱼指令的发送、接收以及指令解析执行是系统的关键部分。而现有的无线收发系统很多都是采用单片机和RF收发模块组成,这样整个控制电路的体积较大,将会使机器鱼的体积变大。为了将机器鱼体积做小以及将功耗降低,这里采用TI公司生产的一种低成本、低功耗的CC1110无线单片机作为指令收发执行的核心器件。CC1110无线收发电路如图4所示。
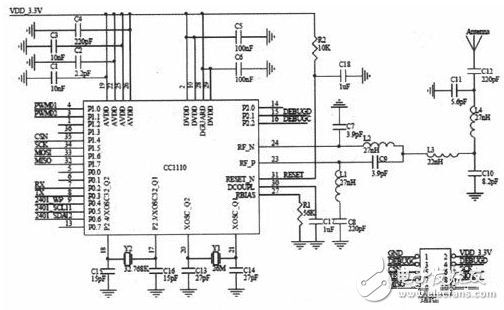
图4 CC1110无线收发电路
在无线收发电路中,电容C1—C6为电源去耦电容;电阻R2和电容C18构成上电复位电路;电容C7、C9以及电感L1、L2构成BALUN阻抗匹配电路,将输出阻抗转换为50 Ω标准天线阻抗;Y1、C13以及C14构成CC1110高速时钟源;Y2、C15以及C16构成CC1110低速时钟源:JATG接口用于在线调试与下载程序;PWM01(P1.0)和PWM02(P1.1)接舵机驱动电路的输入;RX(P0.2)和TX(P0.3)接USB串口转换电路,用于串口通信;2401_WP(P0.4)、2401_SCL(P0.5)以及2401_SDA(P0.6)接存储器模块,控制存储器的读写。
舵机驱动电路
在机器鱼控制系统中,我们利用舵机的摆动来模拟机器鱼的游动。而无线单片机产生的PWM信号不足以驱动舵机,为保证舵机正常工作,要专门设计一个舵机驱动电路。舵机驱动电路采用了NXPSemiconductors公司生产的74AHCT1G04芯片,舵机驱动电路原理图如图5所示。
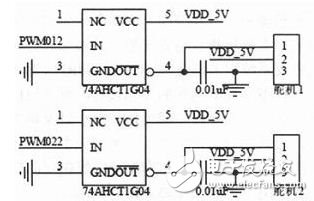
图5 舵机驱动电路
存储器电路
在机器鱼初始化阶段以及在机器鱼控制过程中需要存储一些参数,因此要有专门的存储模块。由于参数的数据量比较小,这里采用Microchip公司生产的I2C接口的24AA01存储芯片,存储器电路原理图如图6所示。
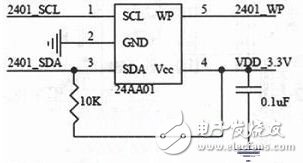
图6 存储器电路
本文设计的机器鱼控制系统通过了下水测试。在机器鱼下水测试阶段,利用串口调试助手对机器鱼进行直接发送控制指令实验,对机器鱼的调直数据保存、直游以及转弯进行了直接控制。测试结果表明,机器鱼控制系统可以有效地接收上位机发送的指令数据,并执行相关的动作,达到了较好的控制效果。同时,本文的研究设计工作为进一步研究设计自主机器鱼以及多鱼协作提供了较好的软硬件设计基础。









